



Products
CNC-Lathe S45
- Product description
Extremely solid machine bed,highest thermostability
Top processing precision
State-of-the-art control technology with Sinumerik 828D or Fanuc Oi TD with ShopTurn and ManualGuide i
Made in the Heart of Europe

HYPERTURN 45
- Product description
CNC Lathe with 2 spindles
12-station tool turret
Driven tools on both turrets
Y axis
Automation with EMCO bar loader, swing loader or gantry loader
Siemens or Fanuc control
EMCONNECT – Digital Process Assistant (Sinumerik ONE)

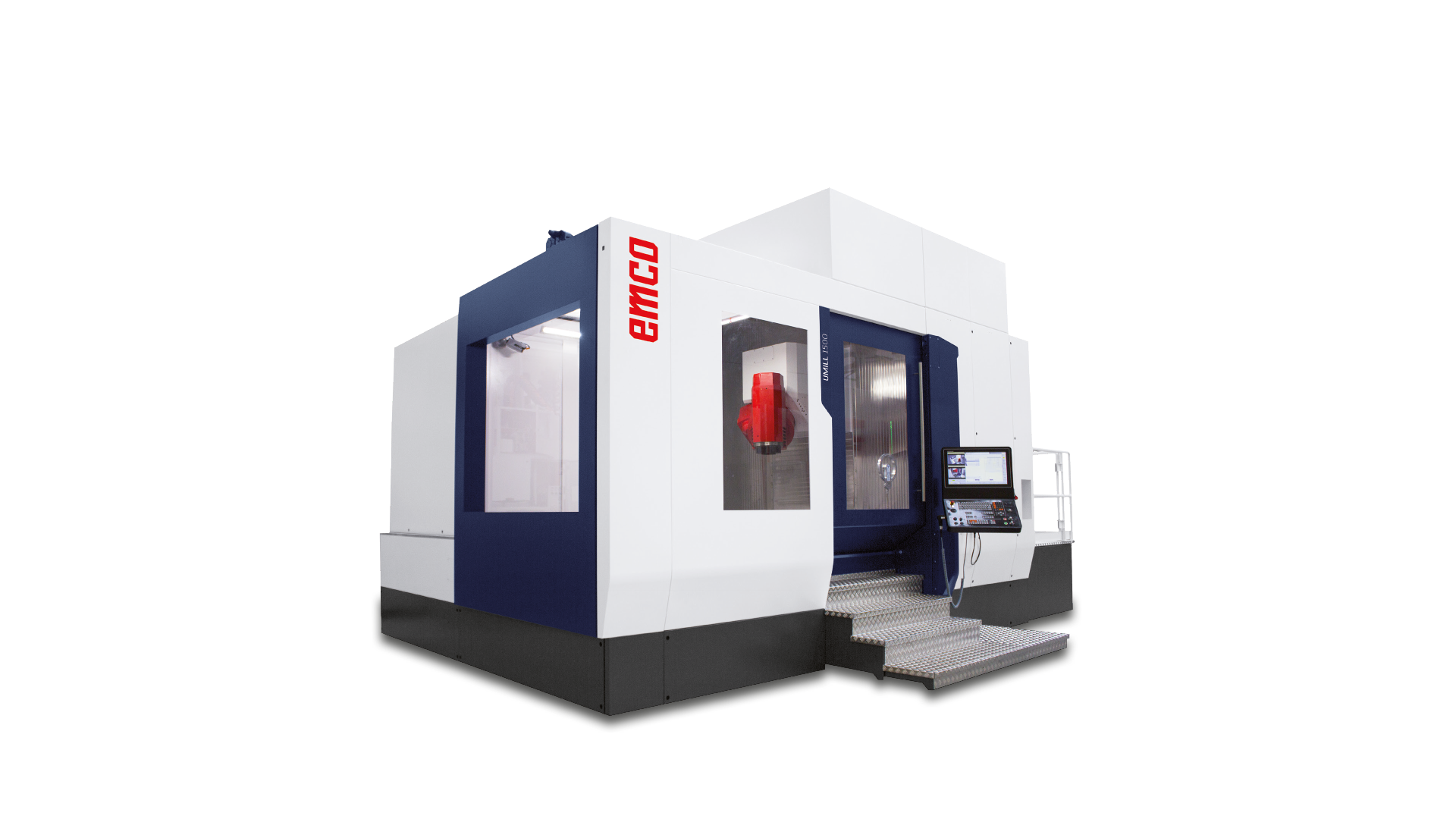
Universal Machining Center UMILL 1500
- Product description
5-axis Gantry Milling Machine for milling and turning operations
Mechanical Milling head 12000 rpm – 38/48 kW (S1/S6), 600 / 750 Nm (S1/S6), HSK100-A
Milling head undercut 15°
Automatic tool changing system including up to 203 pockets
- 01
- 02
- 03

News
Mechanical engineering of the future: Sustainable and…
Mechanical engineering is facing major challenges. In addition to a general reluctance to invest,…
Top training centre with conventional and CNC machines…
Benchmark in apprentice training: The BMW Group plant in Steyr is a model factory. It produces…
Optimized performance values and more flexibility in…
The Hyperturn 50, the successor to the Hyperturn 45 G3, strengthens the Hyperturn series with…
Südstahl to invest in the gantry milling machine…
The family-run company SÜDSTAHL, based in Mertingen, is setting the course for the future: Among the…
ECONOMIC SERIES PRODUCTION WITH THREE AUTOMATED CNC…
MSG Mechatronic Systems GmbH relies on EMCO’s HYPERTURN 45 G3 CNC high-performance turning centre…
New universal milling machine ECOMILL S - With high…
The new universal milling machine ECOMILL S was developed at EMCO MECOF in Belforte Monferrato in…
Austrian machine tool manufacturer with new management
Dr. Markus Nolte takes over as new CEO with great competence and leadership experience
MIBA RELIES ON EMCO FOR RELIABLE AND COMPLETE PROCESS…
Sustainability in energy production: Wind power has become more socially relevant in recent years,…
EMCO is one of the top manufacturers in Europe
The success story of this Austrian company, which was founded in 1947, started with the production…
EMCO History

SEE THE FUTURE, BE THE FUTURE.
The quest for innovation and the development of innovative technologies has always been part of EMCO's philosophy. The chain of evidence is long and begins in 1947. Since then EMCO has shown time and again that it is possible to use impressive knowledge to make groundbreaking machines. And that is not going to change in the future.
Learn more
- 01
- 02

